Scan Matching of Laser Point Clouds Based on the 3D Angle Features within Indoor Environments
Published by IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER) (EI), 2019
Scan Matching of Laser Point Clouds Based on the 3D Angle Features within Indoor Environments
Abstract
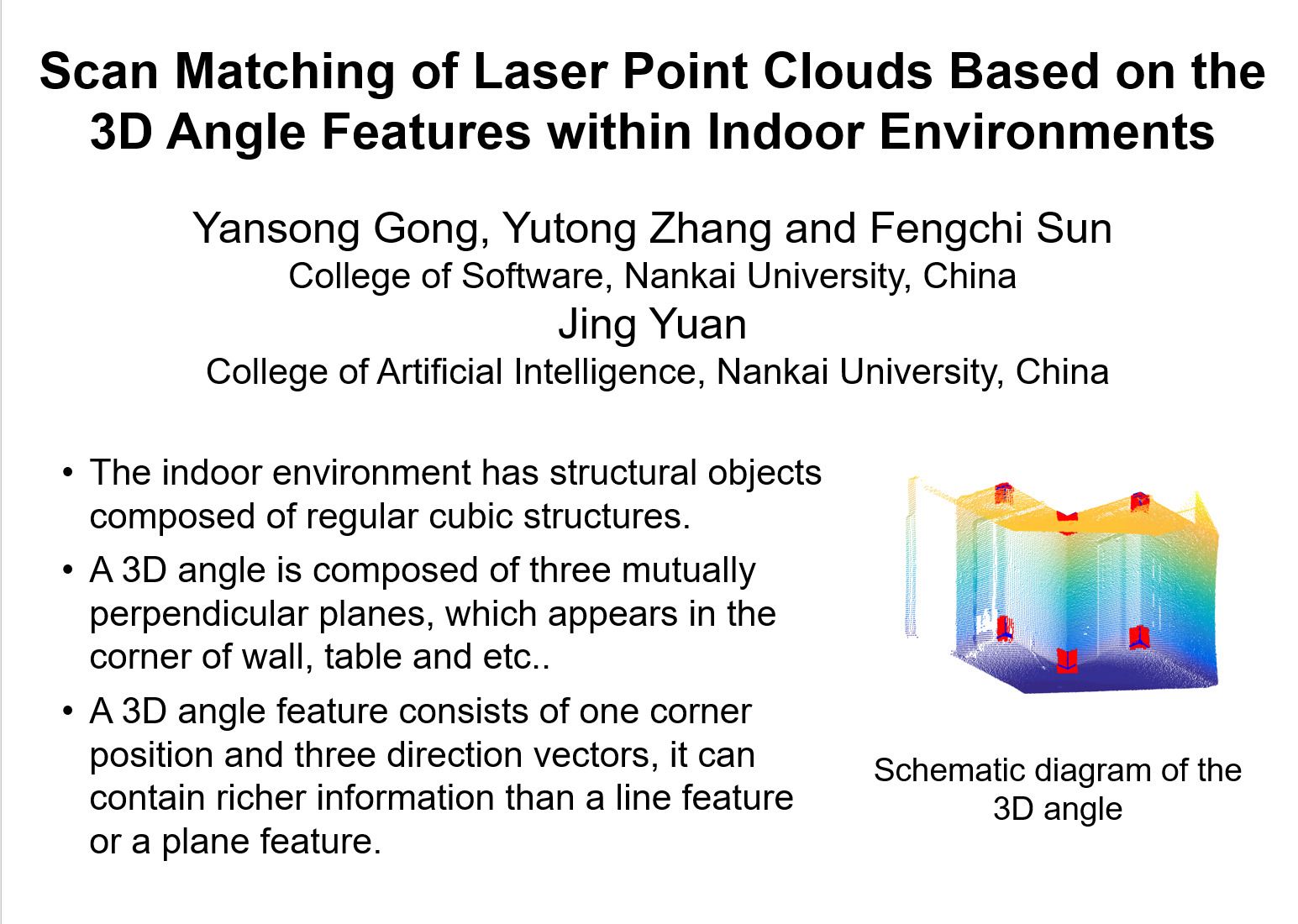
The indoor environment has obvious structural characteristics. In this paper, a scan matching algorithm based on the 3D angle features within indoor environments is proposed. A 3D angle is composed of three mutually perpendicular planes, which appears in the corner of wall, table and so on. Based on the scanning order of point cloud data, key points are extracted and analyzed according to curvature. Our algorithm selects the neighbor of key points and then do eigen decomposition on the matrix of neighbor points to analyze whether they represent a 3D angle according to the relationship among the eigenvalues. The set of neighbor points are projected to a plane and then we can utilize gridded analysis to determine the three mutually perpendicular planes. The maximum matching method is used based on the translation distance and the rotation angle of 3D angles. Finally, the position and orientation information of the 3D angles can solve the pose transformation. Multiple experimental results demonstrate the robustness and accuracy of the proposed algorithm.
Recommended citation: Y. Gong, Y. Zhang, F. Sun and J. Yuan, "Scan Matching of Laser Point Clouds Based on the 3D Angle Features within Indoor Environments," in IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), 2019. http://wdyiwdwd.github.io/files/ASE-Encoder.pdf